TUnIS Navigation MTGyroEMS
TUnIS Navigation MTGyroEMS is a microtunnelling navigation system suitable for long-distance and curved drives in small, non-accessible diameters. The system consists of a primary gyro-based system and a secondary system based on an electromagnetic probe.
Reason why
The purpose of TUnIS Navigation MTGyroEMS is to continuously determine the exact position of the tunnelling machine even when the machine and pipeline cannot be entered.
Read more
Non-accessible microtunnelling drives pose a particular challenge to the navigation system, as no line of sight to the TBM exists. In such cases, conventional control survey using known reference points in the shaft area cannot be used. An alternative solution is required here to improve the relative position data generated by the gyro-compass.
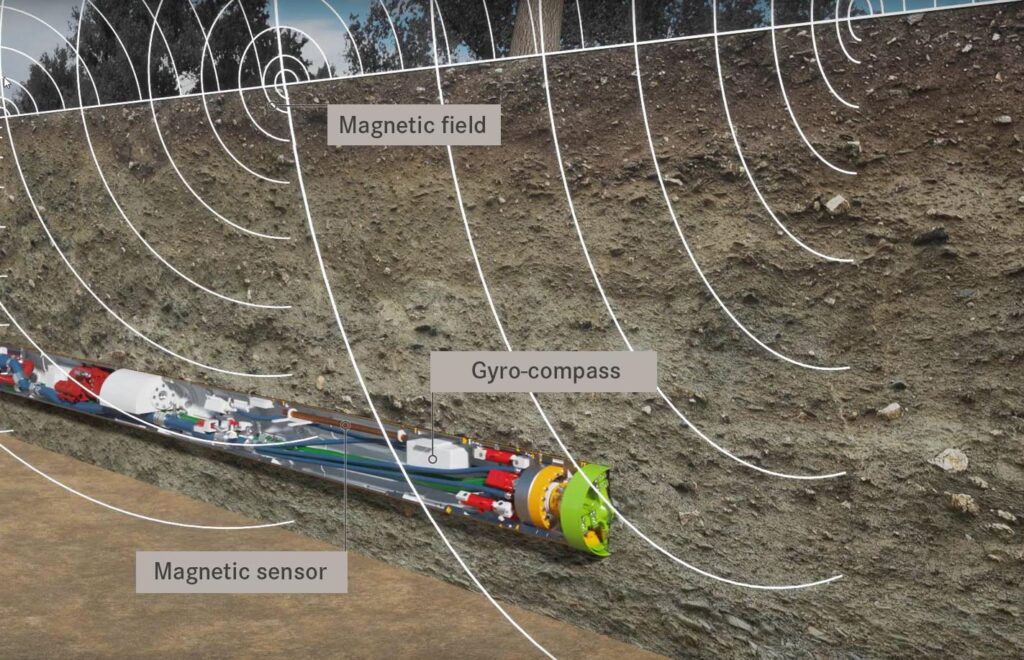
Our hybrid system TUnIS Navigation MTGyroEMS exactly meets these requirements by combining a fibre optic gyro-compass with a secondary system based on an electromagnetic probe. While the gyro-compass provides continuous high-frequency relative position data as a basis for precise steering of the TBM, the secondary system refers itself to a reference coil at the surface. TUnIS Navigation MTGyroEMS thus enables continuous, precise calculation and display of the TBM position.
Benefits
- Precision
Ongoing position determination and high-precision control in the non-accessible diameter range. - Safety
Existing installations such as pipelines, roads, railways and rivers can be crossed under safely. - Investment security
The TUnIS navigation MT software platform is the basis for all VMT navigation systems and benefits directly from further developments and improvements in other navigation areas.
Video
Contact
For more information or project inquiries do not hesitate to contact our expert.
