TUnIS Navigation MTGyroEMS
TUnIS Navigation MTGyroEMS ist ein Navigationssystem im Microtunnelling, das für lange Strecken und Kurven in kleinen und unzugänglichen Durchmessern geeignet ist. Das System besteht aus einem primären Kreiselsystem und einem sekundären elektromagnetischen Sondensystem.
Reason why
Der Zweck von TUnIS Navigation MTGyroEMS ist die kontinuierliche Bestimmung der genauen Position der Vortriebsmaschine, auch wenn die Maschine und die Rohrleitung nicht zugänglich sind.
Mehr erfahren
Nicht begehbare Microtunnelling-Vortriebe stellen eine besondere Herausforderung an das Navigationssystem dar, da keine Sichtverbindung zur TBM besteht. Eine konventionelle Kontrollvermessung mit bekannten Referenzpunkten im Schachtbereich kann in solchen Fällen nicht eingesetzt werden. Hier ist eine alternative Lösung gefragt, um die vom Kreiselkompass generierten relativen Positionsdaten zu verbessern.
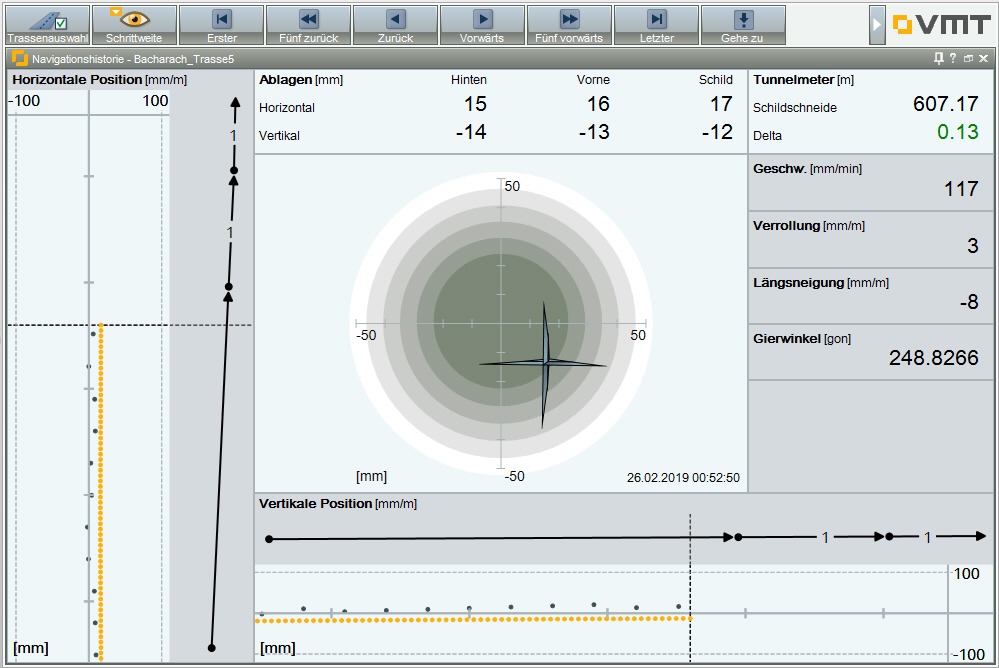
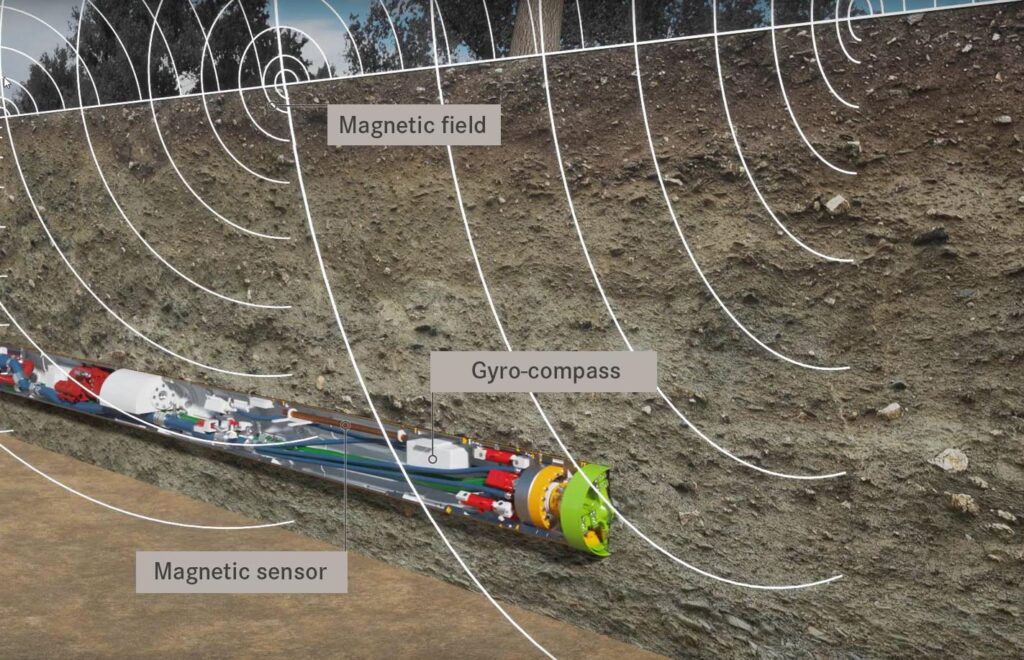
Unser Hybridsystem TUnIS Navigation MTGyroEMS erfüllt genau diese Anforderungen durch die Kombination eines faseroptischen Kreiselkompasses mit einem Sekundärsystem auf Basis einer elektromagnetischen Sonde. Während der Kreiselkompass kontinuierlich hochfrequente relative Positionsdaten als Grundlage für die präzise Steuerung der TBM liefert, bezieht sich das Sekundärsystem auf eine Referenzspule an der Oberfläche. TUnIS Navigation MTGyroEMS ermöglicht somit eine kontinuierliche und präzise Berechnung und Anzeige der TBM-Position.
Benefits
- Präzision
Kontinuierliche Positionsbestimmung und hochpräzise Steuerung im nicht zugänglichen Durchmesserbereich - Sicherheit
Bestehende Anlagen wie Pipelines, Straßen, Bahnlinien und Flüsse können sicher unterquert werden - Investitionssicherheit
Die Softwareplattform TUnIS navigation MT ist die Basis für alle VMT-Navigationssysteme und profitiert direkt von Weiterentwicklungen und Verbesserungen in anderen Navigationsbereichen
Video
Kontakt
Für weitere Informationen oder Projektanfragen zögern Sie nicht, unseren Experten zu kontaktieren.
